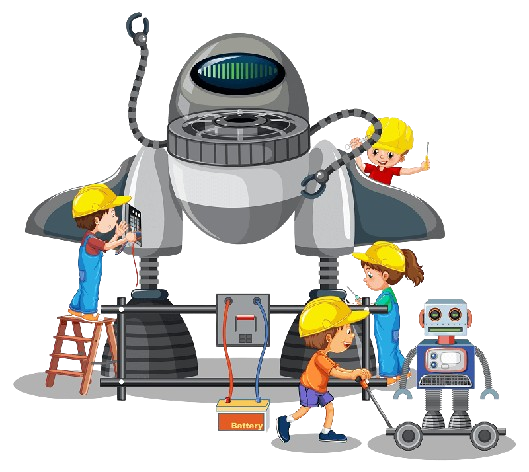
Drain cleaning robot
- Name: Md.Jaeen Nur Aranya (Participant)
Mark:
Short Description:
Project name: Drainbot. Member: Md. Jaeen Nur Aranya ( Idea and CAD) , Contact Number :01866429115 ; Himel Datta Choudhury (Idea), Contact Number : 01796539107 ; Mahfuzur Rahman (Idea), Contact Number: 01310067536; Batch: ME-1.1.
Idea Details:
We have designed a drain cleaning robot, which is based on archimedes screw pump principle. It has three leg with wheel along the barrel shape body which can be extended or retracted indivisually like an aeroplane landing gear.This extension and retraction mechanism is achieved by using hydrolic piston.Basically controlling the each leg indivisually, this robot can go anywhere in the drainage line. Archimedes screw pump is used to lift high volume of water at a time. So we have used the screw pump in ths robot as it can lift heavy weight. This screw pump will collect the dirt from front and push it to the back side of the robot and the dirt will get outside of the drain through a flexible pipe which will be connected to a external dirt collector. We have used mesh barrel underneath the screw so that it can only push the dirt not the water inside the drainage line.We can use an external pump to avoid any issues of overloading. Advantage: -We don't need very high torque output motor to run the pump,because the screw pump itself provide high amount of mechanical advantage,which will multiply the torque output of the existing motor, which will reduce the manufacturing cost. -No human needs to go inside the drainage line to clean the dirt. This robot can be operated by human in a safe way. Disadvantage: -Might need an external pump to reduce the overload on the robot. -Despite using motor shield, motor might get damaged by water and dirt.